
DQN(Deep Q Network)及其代码实现
为什么需要DQN
我们知道,最原始的Q-learning算法在执行过程中始终需要一个Q表进行记录,当维数不高时Q表尚可满足需求,但当遇到指数级别的维数时,Q表的效率就显得十分有限。因此,我们考虑一种值函数近似的方法,实现每次只需事先知晓S或者A,就可以实时得到其对应的Q值。DQN中采用了深度神经网络作为值函数近似的工具,这种方法被证明十分有效。
DQN简介
Q-learning算法很早就有了,但是其与深度学习的结合是在2013年的DeepMind发布的《Playing Atari with Deep Reinforcement Learning》论文中才实现的。这篇论文创造性的将RL与DL实现了融合,提出了存储记忆(Experience Replay)机制和Fixed-Q-Target,实现了一部分Atari游戏操控,甚至超过了人类水平。
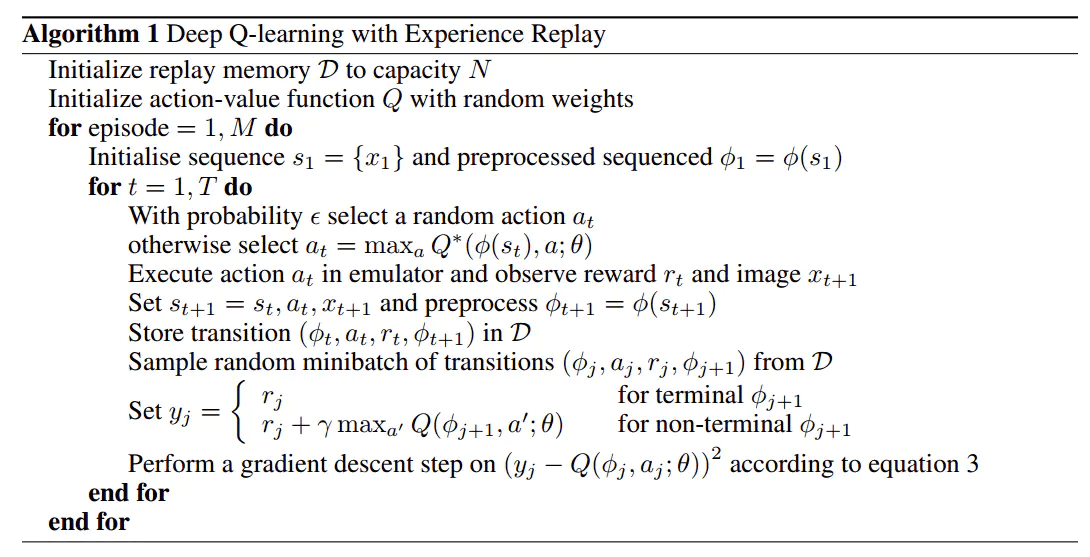
讲到这篇论文的创新点,就是刚刚提到的Experience Replay 和 Fixed-Q-Target.
Experience Replay 经验回放
设计一个经验回放机制,就好比设置一个记忆存储池,这个池子有一定的空间上限,池子里存放着过去一段时间内的经验,包括s,a,r,s_next,分别对应当前s,当前action,当前reward,下一个s.一组(s,a,r,s_next)称为一组transition。
在执行learn()时,智能体会随机从经验池中抽取定量的transition,以进行学习,既可以学习现在也可以学习过去的经验,同时随机的抽取也降低了样本之间的相关性导致的过拟合。
Fixed-Q-Target目标网络
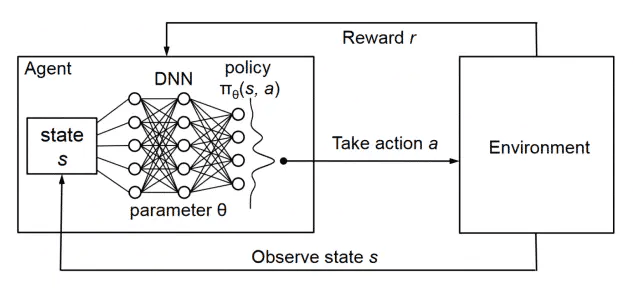
该论文的另一个创新点在于没有只采用一个神经网络进行训练,而是设计了两个网络,评估网络和目标网络,这两个网络在一开始拥有相同的结构和参数配置。在训练过程中,评估网络的参数不断地更新优化,只在一定间隔时间点将评估网络的参数赋给目标网络。评估网络根据输入的s状态给出预测的q_value,目标网络根据s_next的输入给出q_next,再将q_next代入Q-learning的核心递推式中可以得到q_target,最后loss(q_value,q_target)反向传播并优化参数即可不断地得到更好的神经网络,这样经过反复的训练优化后,智能体基本可以掌握各种状态下的action决策。
DQN代码实现
OpenAI gym
openAI开发的python第三方库gym,是一个现阶段主流的强化学习入门的环境。可以为强化学习算法提供许多游戏或者控制场景的接口,让开发者更多关注在算法的研究上而不是环境的设计。
#gym库的基本使用操作如下
import gym
env = gym.make("CartPole-v1") #调用该环境
observation = env.reset() #重置环境
for _ in range(1000):
env.render() #打开环境窗口
action = env.action_space.sample() # 从行为空间随机挑选动作
observation, reward, done, info = env.step(action) #执行一步action之后的返回值
if done:
observation = env.reset()
env.close() #关闭环境
接下来以CartPole游戏为例,具体实现DQN算法:
本项目采用pytorch深度学习框架,先设置好超参数。配置好环境。
import torch # 导入torch
import torch.nn as nn # 导入torch.nn
import torch.nn.functional as F # 导入torch.nn.functional
import numpy as np # 导入numpy
import gym # 导入gym
# 超参数
BATCH_SIZE = 32 # 样本数量
LR = 0.01 # 学习率
EPSILON = 0.9 # greedy policy
GAMMA = 0.9 # reward discount
TARGET_REPLACE_ITER = 100 # 目标网络更新频率
MEMORY_CAPACITY = 2000 # 记忆库容量
env = gym.make('CartPole-v0').unwrapped # 使用gym库中的环境:CartPole,且打开封装
N_ACTIONS = env.action_space.n # 杆子动作个数 (2个)
N_STATES = env.observation_space.shape[0] # 杆子状态个数 (4个)
定义Net类,本质是两个全连接层神经网络构成输入和输出,中间加一个relu激活函数层。该神经网络模型的输入维度是N_STATES,输入是游戏中的状态向量(需转换为tensor类型)。输出维度是N_ACTIONS,输出是各个action的价值,即actions_value。两个全连接层的初始权重设置为方差为0.1的正态分布。
# 定义Net类 (定义网络)
class Net(nn.Module):
def __init__(self): # 定义Net的一系列属性
# nn.Module的子类函数必须在构造函数中执行父类的构造函数
super(Net, self).__init__() # 等价与nn.Module.__init__()
self.fc1 = nn.Linear(N_STATES, 50) # 设置第一个全连接层(输入层到隐藏层): 状态数个神经元到50个神经元
self.fc1.weight.data.normal_(0, 0.1) # 权重初始化 (均值为0,方差为0.1的正态分布)
self.out = nn.Linear(50, N_ACTIONS) # 设置第二个全连接层(隐藏层到输出层): 50个神经元到动作数个神经元
self.out.weight.data.normal_(0, 0.1) # 权重初始化 (均值为0,方差为0.1的正态分布)
def forward(self, x): # 定义forward函数 (x为状态)
x = F.relu(self.fc1(x)) # 连接输入层到隐藏层,且使用激励函数ReLU来处理经过隐藏层后的值
actions_value = self.out(x) # 连接隐藏层到输出层,获得最终的输出值 (即动作值)
return actions_value # 返回动作值
定义DQN类,主线思路是围绕eval_net和target_net两个网络展开,定义choose_action函数实现部分贪婪策略选择action,store_transition函数实现经验的存储管理,最核心的函数是learn函数,当经验池中存放满了经验之后,智能体开始在池中随机抽取经验进行学习,每次抽取BATCH_SIZE的行数,经过整理后得到b_s,b_a,b_r,b_s_四个可以被送入神经网络的张量。
接下来,将b_s送入eval_net得到输出q_eval;将b_s_送入target_net得到输出q_next(注意,这次送入神经网络只是为了得到q_next,我们并不关心此刻target_net网络权重参数是否优化,因此我们采用了.detach()方法来阻断反向传播),最后就是我们炼丹的常用套路,将q_value和q_target放入loss_function中,然后反向传播,采用Adam优化算法来更新评估网络参数。
# 定义DQN类 (定义两个网络)
class DQN(object):
def __init__(self): # 定义DQN的一系列属性
self.eval_net, self.target_net = Net(), Net() # 利用Net创建两个神经网络: 评估网络和目标网络
self.learn_step_counter = 0 # for target updating
self.memory_counter = 0 # for storing memory
self.memory = np.zeros((MEMORY_CAPACITY, N_STATES * 2 + 2)) # 初始化记忆库,一行代表一个transition
self.optimizer = torch.optim.Adam(self.eval_net.parameters(), lr=LR) # 使用Adam优化器 (输入为评估网络的参数和学习率)
self.loss_func = nn.MSELoss() # 使用均方损失函数 (loss(xi, yi)=(xi-yi)^2)
def choose_action(self, x): # 定义动作选择函数 (x为状态)
x = torch.unsqueeze(torch.FloatTensor(x), 0) # 将x转换成32-bit floating point形式,并在dim=0增加维数为1的维度
if np.random.uniform() < EPSILON: # 生成一个在[0, 1)内的随机数,如果小于EPSILON,选择最优动作
actions_value = self.eval_net.forward(x) # 通过对评估网络输入状态x,前向传播获得动作值
action = torch.max(actions_value, 1)[1].data.numpy() # 输出每一行最大值的索引,并转化为numpy ndarray形式
action = action[0] # 输出action的第一个数
else: # 随机选择动作
action = np.random.randint(0, N_ACTIONS) # 这里action随机等于0或1 (N_ACTIONS = 2)
return action # 返回选择的动作 (0或1)
def store_transition(self, s, a, r, s_): # 定义记忆存储函数 (这里输入为一个transition)
transition = np.hstack((s, [a, r], s_)) # 在水平方向上拼接数组
# 如果记忆库满了,便覆盖旧的数据
index = self.memory_counter % MEMORY_CAPACITY # 获取transition要置入的行数
self.memory[index, :] = transition # 置入transition
self.memory_counter += 1 # memory_counter自加1
def learn(self): # 定义学习函数(记忆库已满后便开始学习)
# 目标网络参数更新
if self.learn_step_counter % TARGET_REPLACE_ITER == 0: # 一开始触发,然后每100步触发
self.target_net.load_state_dict(self.eval_net.state_dict()) # 将评估网络的参数赋给目标网络
self.learn_step_counter += 1 # 学习步数自加1
# 抽取记忆库中的批数据
sample_index = np.random.choice(MEMORY_CAPACITY, BATCH_SIZE) # 在[0, 2000)内随机抽取32个数,可能会重复
b_memory = self.memory[sample_index, :] # 抽取32个索引对应的32个transition,存入b_memory
b_s = torch.FloatTensor(b_memory[:, :N_STATES])
# 将32个s抽出,转为32-bit floating point形式,并存储到b_s中,b_s为32行4列
b_a = torch.LongTensor(b_memory[:, N_STATES:N_STATES+1].astype(int))
# 将32个a抽出,转为64-bit integer (signed)形式,并存储到b_a中 (之所以为LongTensor类型,是为了方便后面torch.gather的使用),b_a为32行1列
b_r = torch.FloatTensor(b_memory[:, N_STATES+1:N_STATES+2])
# 将32个r抽出,转为32-bit floating point形式,并存储到b_s中,b_r为32行1列
b_s_ = torch.FloatTensor(b_memory[:, -N_STATES:])
# 将32个s_抽出,转为32-bit floating point形式,并存储到b_s中,b_s_为32行4列
# 获取32个transition的评估值和目标值,并利用损失函数和优化器进行评估网络参数更新
q_eval = self.eval_net(b_s).gather(1, b_a)
# eval_net(b_s)通过评估网络输出32行每个b_s对应的一系列动作值,然后.gather(1, b_a)代表对每行对应索引b_a的Q值提取进行聚合
q_next = self.target_net(b_s_).detach()
# q_next不进行反向传递误差,所以detach;q_next表示通过目标网络输出32行每个b_s_对应的一系列动作值
q_target = b_r + GAMMA * q_next.max(1)[0].view(BATCH_SIZE, 1)
# q_next.max(1)[0]表示只返回每一行的最大值,不返回索引(长度为32的一维张量);.view()表示把前面所得到的一维张量变成(BATCH_SIZE, 1)的形状;最终通过公式得到目标值
loss = self.loss_func(q_eval, q_target)
# 输入32个评估值和32个目标值,使用均方损失函数
self.optimizer.zero_grad() # 清空上一步的残余更新参数值
loss.backward() # 误差反向传播, 计算参数更新值
self.optimizer.step() # 更新评估网络的所有参数
最后写主程序,跑400个episode,基本可以实现较好的游戏控制效果。
dqn = DQN() # 令dqn=DQN类
for i in range(400): # 400个episode循环
print('<<<<<<<<<Episode: %s' % i)
s = env.reset() # 重置环境
episode_reward_sum = 0 # 初始化该循环对应的episode的总奖励
while True: # 开始一个episode (每一个循环代表一步)
env.render() # 显示实验动画
a = dqn.choose_action(s) # 输入该步对应的状态s,选择动作
s_, r, done, info = env.step(a) # 执行动作,获得反馈
# 修改奖励 (不修改也可以,修改奖励只是为了更快地得到训练好的摆杆)
x, x_dot, theta, theta_dot = s_
r1 = (env.x_threshold - abs(x)) / env.x_threshold - 0.8
r2 = (env.theta_threshold_radians - abs(theta)) / env.theta_threshold_radians - 0.5
new_r = r1 + r2
dqn.store_transition(s, a, new_r, s_) # 存储样本
episode_reward_sum += new_r # 逐步加上一个episode内每个step的reward
s = s_ # 更新状态
if dqn.memory_counter > MEMORY_CAPACITY: # 如果累计的transition数量超过了记忆库的固定容量2000
# 开始学习 (抽取记忆,即32个transition,并对评估网络参数进行更新,并在开始学习后每隔100次将评估网络的参数赋给目标网络)
dqn.learn()
if done: # 如果done为True
# round()方法返回episode_reward_sum的小数点四舍五入到2个数字
print('episode%s---reward_sum: %s' % (i, round(episode_reward_sum, 2)))
break # 该episode结束
env.close()
总结
DQN是深度学习和强化学习结合的一个例子,在游戏操控领域大放异彩,其本质思想仍然是Q-learning的时序差分算法和贪婪策略思想。在借助了神经网络的作用下,实现了价值函数近似的功能,并且利用经验回放机制和双神经网络架构,保证了算法的稳定性,降低了过拟合的概率。本文只是对于DQN入门级别的介绍。后续在学习过程中还会不断补充更加进一步地学习强化学习。
参考链接
强化学习DQN及其变体原理与PARL实现
DQN 的算法思想和代码实现
DQN PyTorch代码详解
来源:LuKaiNotFound



